4.2.2.1 キャリブレーションの始め方(マイクロコントローラベースの製品の場合)
4.2.2.1.1 対象製品
- myCobot 280-M5
- myCobot 320-M5
- myPalletizer 260
4.2.2.1.2 操作方法
-
最新バージョンのatomMainをAtomに書き込みます。
-
Basicにminirobotを書き込み、
Calibration機能を選択します。
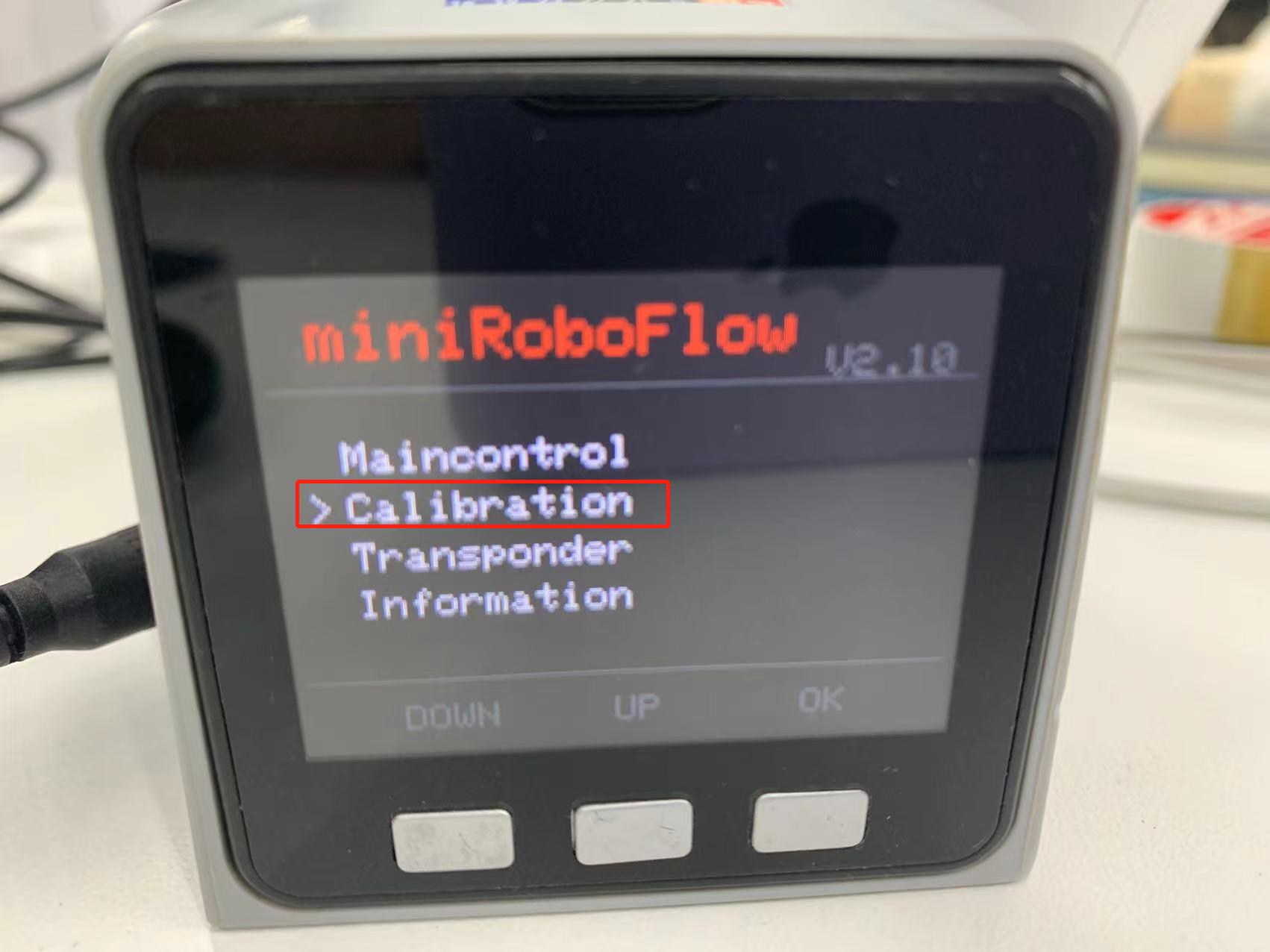
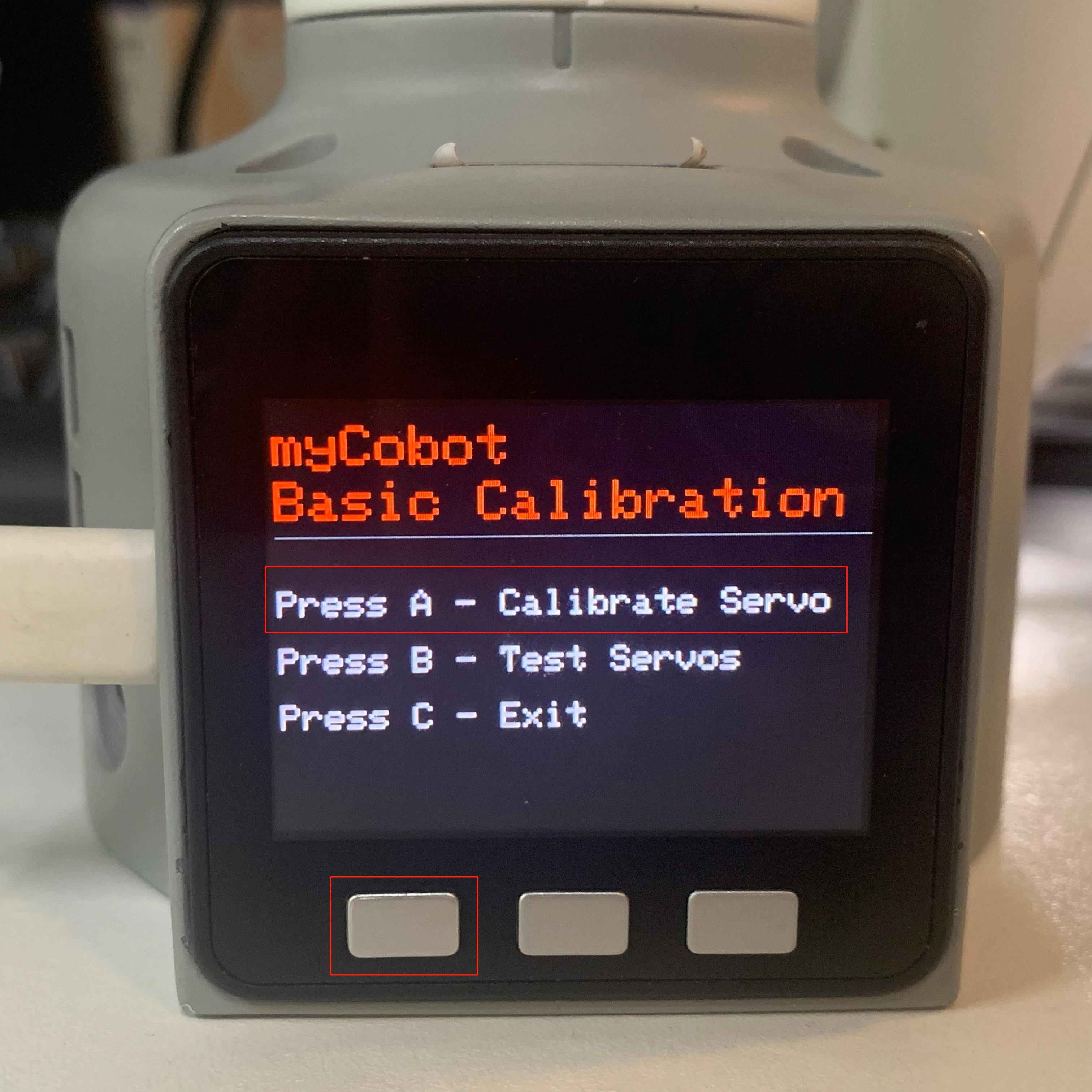
Aキーを押してキャリブレーションをスタートします。
- ロボットアームのジョイント1がゼロポジションのラインに合うように動かします。

-
ディスプレイに表示されるモーター番号(1〜6)に従って、各ポイントがゼロポジションに合うようロボットアームを動かします。
-
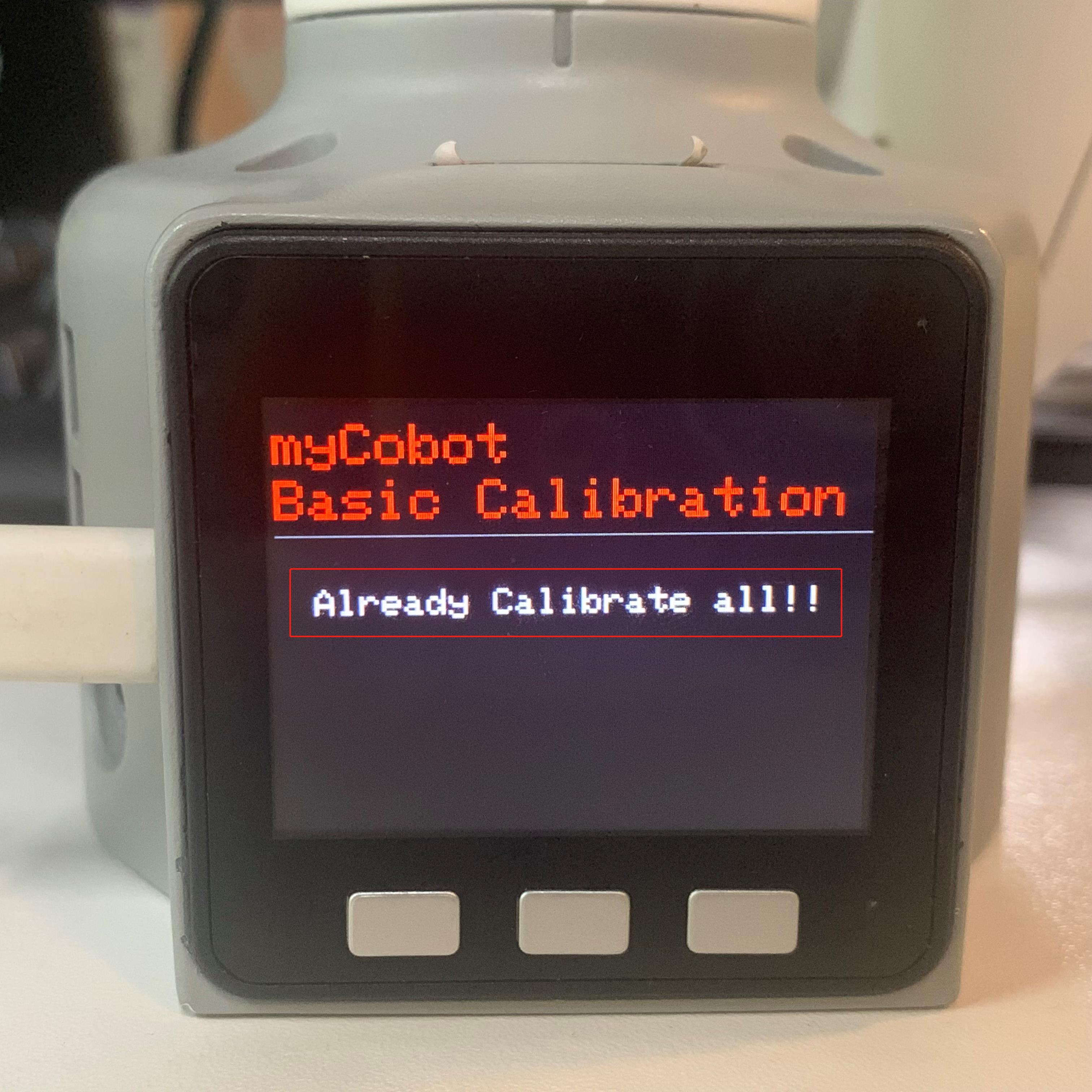
NEXTを押して次のモーターの設定に進みます。すべてのモーターを設定し終わるとAlready Calibrate all !!と表示されます。これでキャリブレーションが完了しました。
EXITを押してキャリブレーションを終了します。Bキーを押すとすべてのジョイントのゼロポジションをテストします。
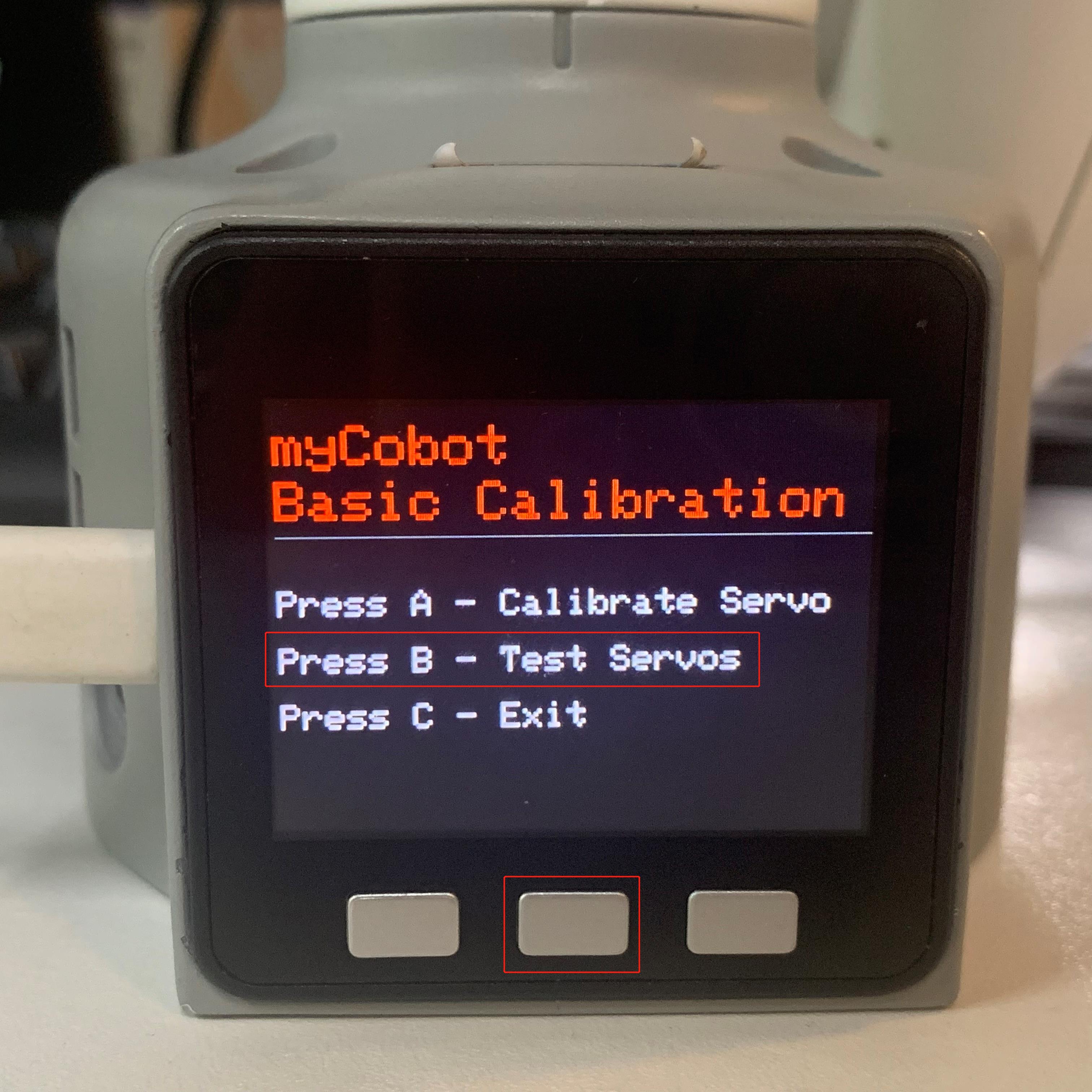
Cキーを押すとプログラムを終了します。
4.2.2.1.3 ビデオチュートリアル
https://www.bilibili.com/video/BV1FT4y1P7BV/
出典 : Elephant Robotics資料 Starting robot arm calibration (for micro-controller devices)