4.2.1.2 ドラッグティーチング(手動で記録させた動作)の始め方(マイクロCPUベース製品の場合)
4.2.1.2.1 対象製品
- myCobot 280-Pi
- myCobot 320-Pi
4.2.1.2.2 操作方法
-
最新バージョンのatomMainをAtomに書き込みます。
-
デスクトップに
* .pyフォーマットのPythonファイルを新たに作成します。以下のコードをコピーして保存します(例としてdrag_trial_teachingというファイル名で表示しています)。 -
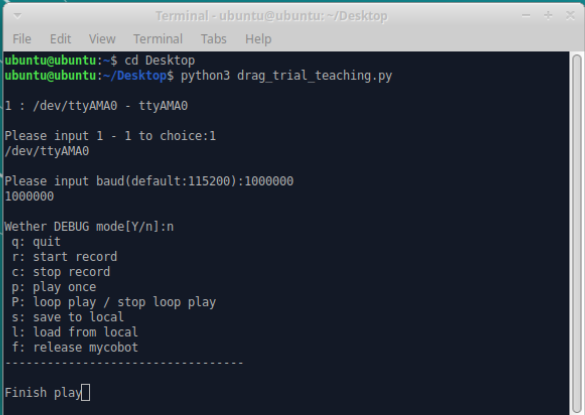
ターミナルを開いて以下のコードを入力します。
cd Desktop
python3 drag_trial_teaching.py

-
1と入力してEnterを押します。 -
製品ごとに対応するボーレートを入力して
Enterを押します。- myCobot 280-Pi :1000000
- myCobot 320-Pi : 115200
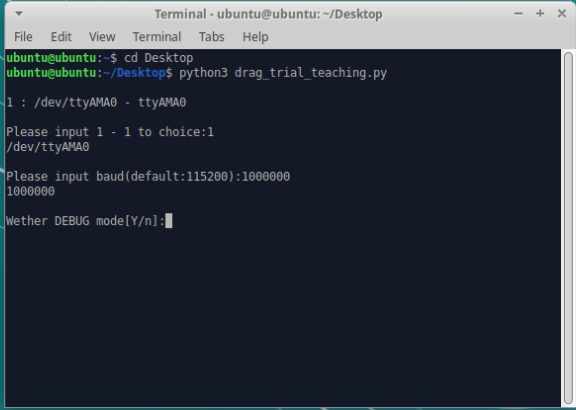
Do you want to check BAUD? (ボーを確認しますか?)と表示されたらYまたはNを入力してEnterを押します。
-
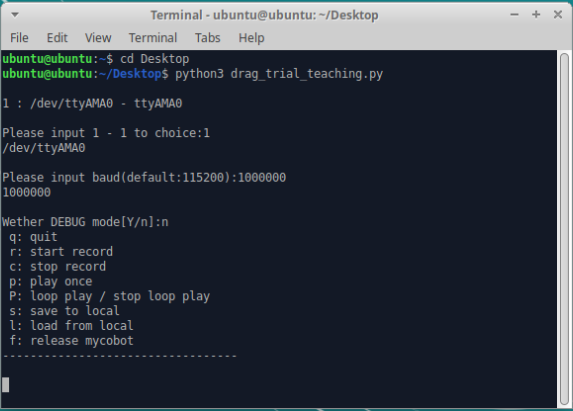
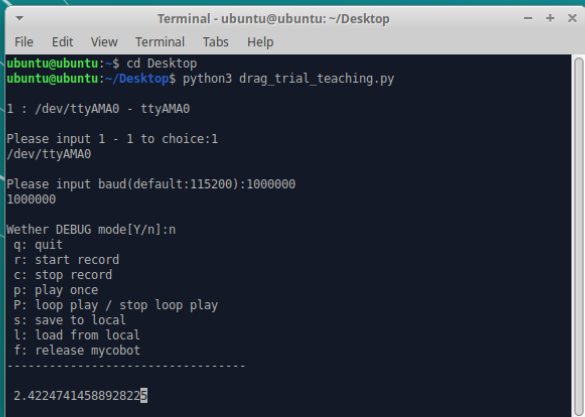
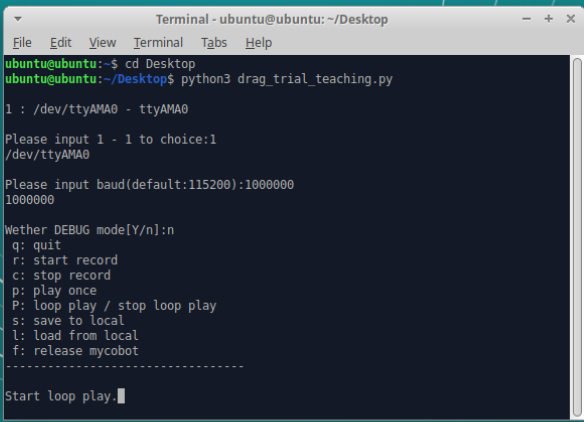
機能オプションが表示されます。
- キーボードの
qを押すとプログラムを終了します。 - キーボードの
rを押すとドラッグティーチングの記録がスタートします。
- キーボードの
- キーボードの
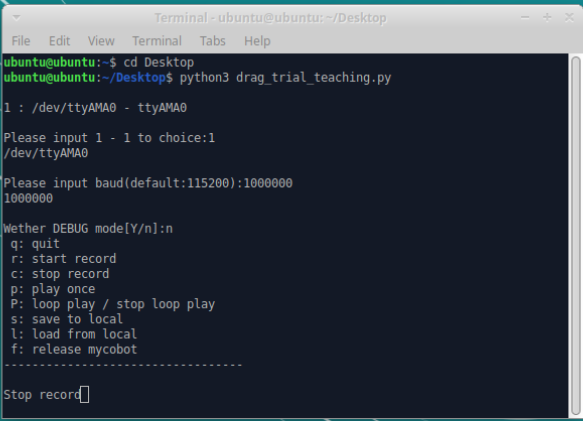
cを押すと記録をストップします。
- キーボードの
pを押すと動きを1度だけ再生します。

- キーボードの
Pを押すと動きを繰り返し再生します(再生を止めるにはキーボードのqでプログラムを終了します)。
- キーボードの
fを押すとロボットアームの各ジョイントのロックを解除します(ロボットアームの動きを止めたり、全てのジョイントがロックされている時に使用します)。
4.2.1.2.3 コード
*コードはdrag_trial_teaching.pyです。GitHubからダウンロードできます。
出典 : Elephant Robotics資料 Drag teaching