DepthAIを使うための最初のステップ
DepthAIを使うための最初のステップ
このガイドでは、OAKカメラとDepthAIライブラリを使った最初のステップを説明します。
-
DepthAIのインストール
-
デバイスのセットアップ(OAKカメラとホストコンピュータの接続)
-
DepthAI の実行(PythonベースのGUIアプリケーションのデモ)
-
次のステップ (使用例、デモ、APIドキュメント)
DepthAIをインストールする
- Macの場合 ターミナルで以下のスクリプトを実行してください。
bash -c "$(curl -fL https://docs.luxonis.com/install_depthai.sh)"~
問題が発生した場合は、このドキュメントを参照してください。
-
Windowsの場合 Windows10/11のユーザーは、Windowsインストーラを使用してDepthAIをインストールできます。インストーラーが終了したら、アプリケーションのリストからDepthAIアプリケーションを直接実行し、DepthAIデモを実行することができます。このチュートリアルのセットアップセクション(インストーラーがすべてのセットアップを行うため)をスキップして、直接デフォルトの実行に進むこともできます。
-
Linuxの場合 ターミナルで以下のスクリプトを実行してください。
sudo wget -qO- https://docs.luxonis.com/install_depthai.sh | bash
問題が発生した場合は、このドキュメントを参照してください。
※インストーラの使用を避け、依存関係、要件、DepthAIを手動でインストールしたい場合は、DepthAIの手動インストールを参照してください。
デバイスをセットアップする
次にデバイスをセットアップします。OAKカメラは接続方法によって、イーサネット経由(OAK PoEカメラ)とUSB経由(その他)の2つのカテゴリーに分けられます。
-
OAK PoEカメラ OAK PoEデバイスを使用する場合は、まずデバイスをPoEスイッチまたはPoEインジェクターに接続する必要があります。詳細なチュートリアルについては、OAK PoEデバイスを使い始めるを参照してください。
-
OAK USBカメラ OAKにUSBケーブルが付属している場合は、それを使用してOAKカメラをコンピュータに接続することをお勧めします。
注意:USB3ケーブルを必ず使用してください。USB3ケーブルを使用できない場合は、こちらを参照してください。

上の写真のように、USB3ケーブルは、USB-CケーブルのUSB-Aコネクタの内側が青く着色されています。青くない場合はUSB2充電ケーブルの可能性があります。
デバイスがホスト(PC、Raspberry Pi、またはその他のコンピュータ)のUSB3ポートに直接、または電源付きUSBハブを介して接続されていることを確認してください。
初期動作(デモ)
インストールが終了すると、自動的にDepthAIデモスクリプトが実行されます。以下のコマンドで手動で実行することもできます。
$ python3 depthai_demo.py
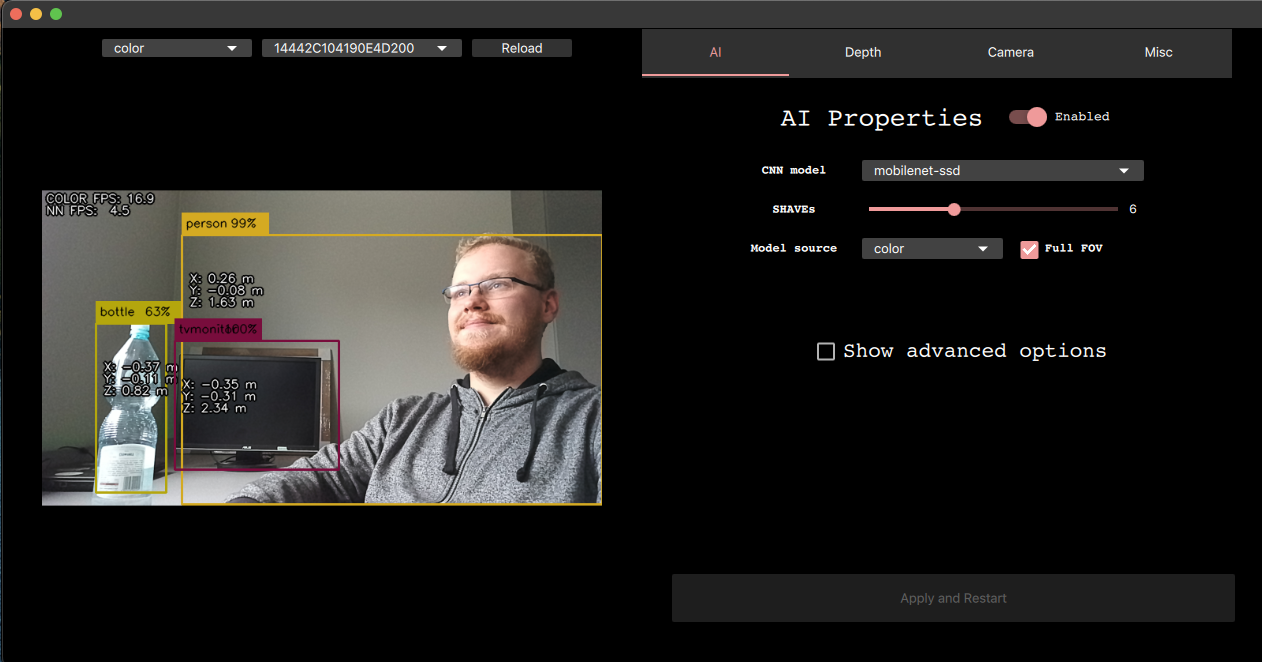
このコマンドが実行されると、デフォルトのMobileNet-SSDモデル(高速に物体物体検知を行うAIモデル)がコンパイルされダウンロードされます。OAKカメラが設定され、デバイスのRGBカメラからスケールが変更されたプレビューを含むデフォルトのcolorプレビューが表示されます。
プレビューの変更
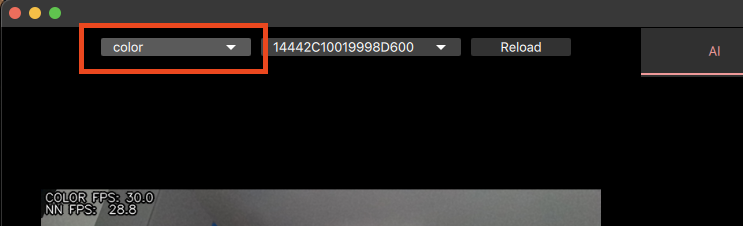
デバイスから他のプレビューを見るには、GUIの左上セクションに表示されているプレビュースイッチャーを使用します。
利用可能なプレビュー
| 名称 | 詳細 | 制限 |
|---|---|---|
color |
カラーカメラからのプレビューを表示します | なし |
nnInput |
右モノラルカメラからのプレビューを表示します | AIモデルが動作していない場合は無効 |
left |
左モノラルカメラからのプレビューを表示します | ステレオが必要 |
right |
右モノラルカメラからのプレビューを表示します | ステレオが必要 |
depth |
DepthRawプレビューとJETカラーから計算された視差マップを表示します。奥行きの視覚化に最適です。 |
ステレオが必要 |
depthRaw |
深度マップの生データを表示します。深度ベースの計算に最適です。 | ステレオが必要 |
disparity |
デバイス上で生成された視差マップを表示します。 | ステレオが必要 |
disparityColor |
デバイス上で生成された視差マップをJETカラーで表示します。depthプレビューと同じように、デバイス上で生成されます。 |
ステレオが必要 |
rectifiedLeft |
左カメラ画像のレクティフィケーションを行います。 | ステレオが必要 |
rectifiedRight |
右カメラ画像のレクティフィケーションを行います。 | ステレオが必要 |
デフォルトモデル
デモが実行されている間、検出結果を見ることができます。もしあなたがカメラの前に立っていたら、かなり高い確率であなたが人として検出されるはずです。
デフォルトで使用されているモデルは、PASCAL 2007 VOCクラスで学習されたMobileNetv2 SSDオブジェクト検出器です。
検出対象は以下のものです。
- 人物:人
- 動物:鳥、猫、牛、犬、馬、羊
- 乗り物:飛行機、自転車、ボート、バス、車、バイク、電車
- 屋内:ボトル、椅子、ダイニングテーブル、鉢植え、ソファ、テレビやモニター
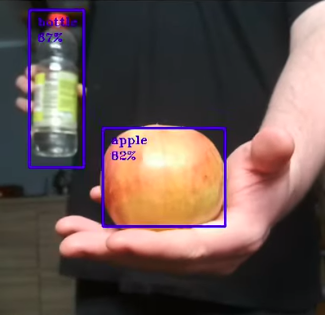
ボトルやリンゴなど、さまざまな物体を検知してみましょう。
注:DepthAIデモについては、DepthAIデモに関する追加ドキュメントを参照してください。
次のステップ
これまでのセクションでは、DepthAIの基本的な機能を確認する方法を学びました。ここから、DepthAIの世界をさらに探求することができます。
- 使用例
DepthAIで特定の問題を解決するアプリケーションの使用例(翻訳済み)をご覧ください。
- コーディングを始める
APIセクションのhello worldチュートリアル(翻訳済み)で、APIをステップバイステップで紹介しています。
- カスタムモデルを構築してOAKに実装する
すぐに使えるColabノートブックについてはカスタムトレーニングページをご覧ください。
- OAKデバイス用に開発されたアプリ
luxonis/depthai-experimentsリポジトリを参照してください。
- Depthai APIライブラリリポジトリ
depthai APIライブラリのPythonバインディング、コードサンプル、様々なユーティリティプログラムを含むluxonis/depthai-pythonリポジトリを参照してください。
質問がありますか? 技術サポートやその他の質問については、ディスカッションフォーラムへどうぞ。
出典 : Luxonisの資料 - First steps with DepthAI
https://docs.luxonis.com/en/latest/pages/tutorials/first_steps/
*このガイドはLuxonis社の許可を得て、スイッチサイエンスが翻訳しています。