ROSを使ってreComputer上で複数のCSIカメラを使用する方法
ROSを使ってreComputer上で複数のCSIカメラを使用する方法
このチュートリアルでは、reComputer J30/J40シリーズデバイス(リンク先はreComputer J4012です)のROSを通して複数のCSIカメラ画像データを読み取り、RVIZ可視化インターフェースに表示する画像トピックを公開する方法をステップバイステップで説明します。

前提条件
reComputer J30/J40シリーズデバイス(リンク先はreComputer J4012です):提供されているチュートリアルに従って、JetPack 5.xシステムとROS Noetic環境のインストールが完了していることを確認してください。
対応カメラは以下の通りです。
-
IMX219カメラ
- Raspberry Pi Camera V2※
- IMX219-130 8MP Camera with 130° FOV※
- IMX219-160 8MP Camera with 160° FOV※
- IMX219-200 8MP Camera with 200° FOV
- IMX219-77 8MP Camera with 77° FOV※
- IMX219 M12/CS mount CMOS Camera Module※
- IMX219-83 8MP 3D Stereo Camera Module
- IMX219-77IR 8MP IR Night Vision Camera with 77° FOV
- IMX219-160IR 8MP Camera with 160° FOV
- IMX219 M12/CS mount CMOS Camera Module※
-
IMX477カメラ
※一部カメラは、スイッチサイエンスでお買い求め頂けます。
はじめに
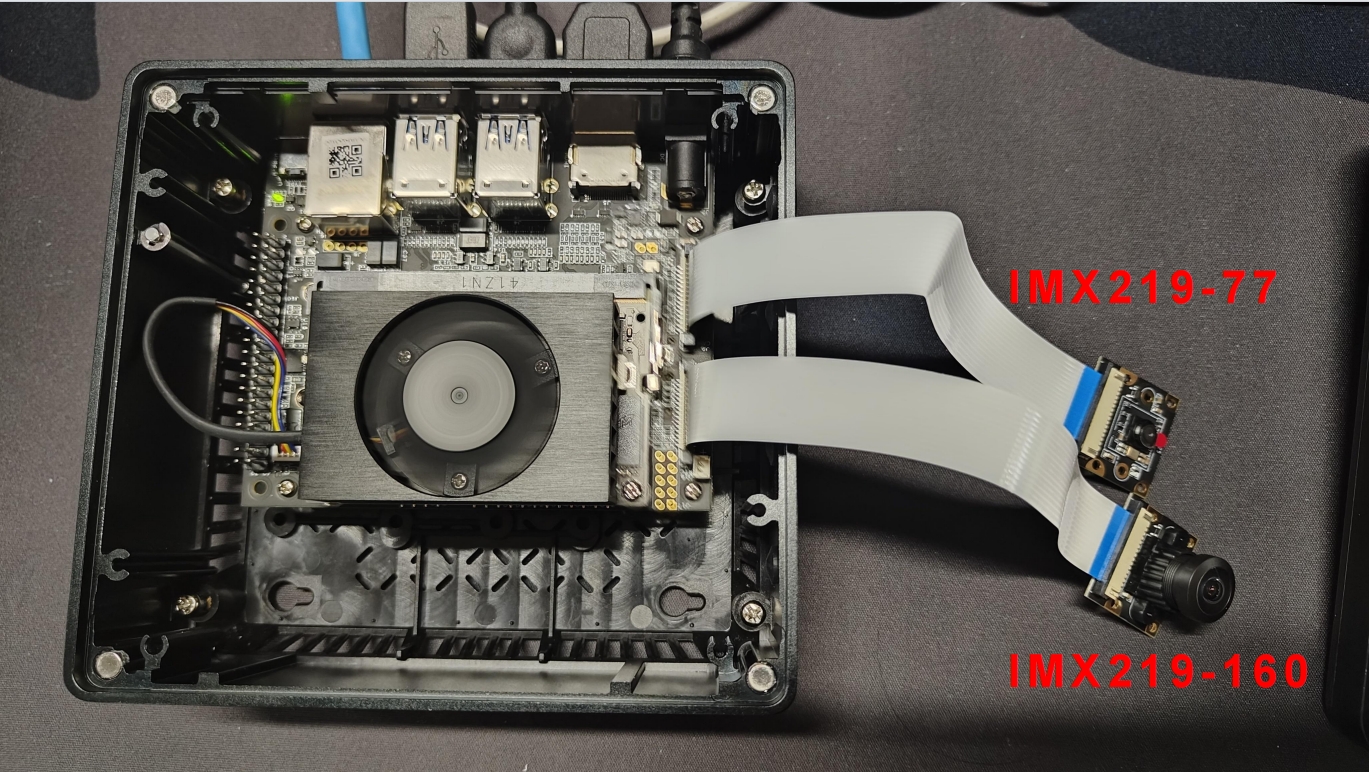
カメラを接続する
下記のチュートリアルに従って、CSIカメラの接続とテストを完了し、ROSがすでにシステムにインストールされていることを確認してください。
インストール
- ステップ1:reComputerでターミナルを開き、ワークスペース用のディレクトリを作成する
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
- ステップ2:目的のROSパッケージをクローンする
git clone https://github.com/ZhuYaoHui1998/csi_camera_reader.git
- ステップ3:ワークスペースを作る
cd ~/catkin_ws/
catkin_make
- ステップ4:セットアップファイルをもう一度ソースにコピーして、環境を更新してください
source devel/setup.bash
実行方法
一つのカメラストリームをROSトピック /csi_cam_0/image_raw に公開するには、ターミナルで次のコマンドを使用します
roslaunch csi_camera_reader csi_camera.launch sensor_id:=0
インターフェイスに合わせてsensor_idを1に変更することもできます
roslaunch csi_camera_reader csi_camera.launch sensor_id:=1
2台のCSIカメラを同時に開き、ROSにトピックを公開したい場合は、以下のコマンドを実行します
roslaunch csi_camera_reader dual_camera.launch
ターミナルで “rostopic list“コマンドを入力すると、カメラから公開された画像トピックを見ることができます。

また、RVIZ可視化ツールを使用して、画像情報を表示することもできます。

テクニカルサポートと製品に関するフォーラム
ご購入いただいた製品をスムーズにお使いいただけるよう、Seeedでは様々なサポートを提供しています。ご希望に合わせてコンタクトの方法をお選びください。
出典 : Seeed Studio資料 Wiki - How to Use Multiple CSI Cameras on reComputer with ROS
https://wiki.seeedstudio.com/csi_camera_on_ros/
*このガイドはSeeed Studioの許可を得て、スイッチサイエンスが翻訳しています。