4.2.2 ロボットアームのキャリブレーション
ロボットアームの正確なコントロールにはキャリブレーションが必要です。ジョイントのゼロ位置を設定し、モーターの可動域を初期化することで、高度な開発に備えます。
製品のタイプごとに操作方法は異なります。以下は主な例です。
- 最新バージョンのatomMainをAtomに、Basicにminirobotを書き込みます。
Calibration機能を選択します(マイクロCPUベースの製品にはBasicの書き込みは必要ありません)。- ロボットアームのすべてのジョイントを動かしてゼロポジションのマークに合わせます。
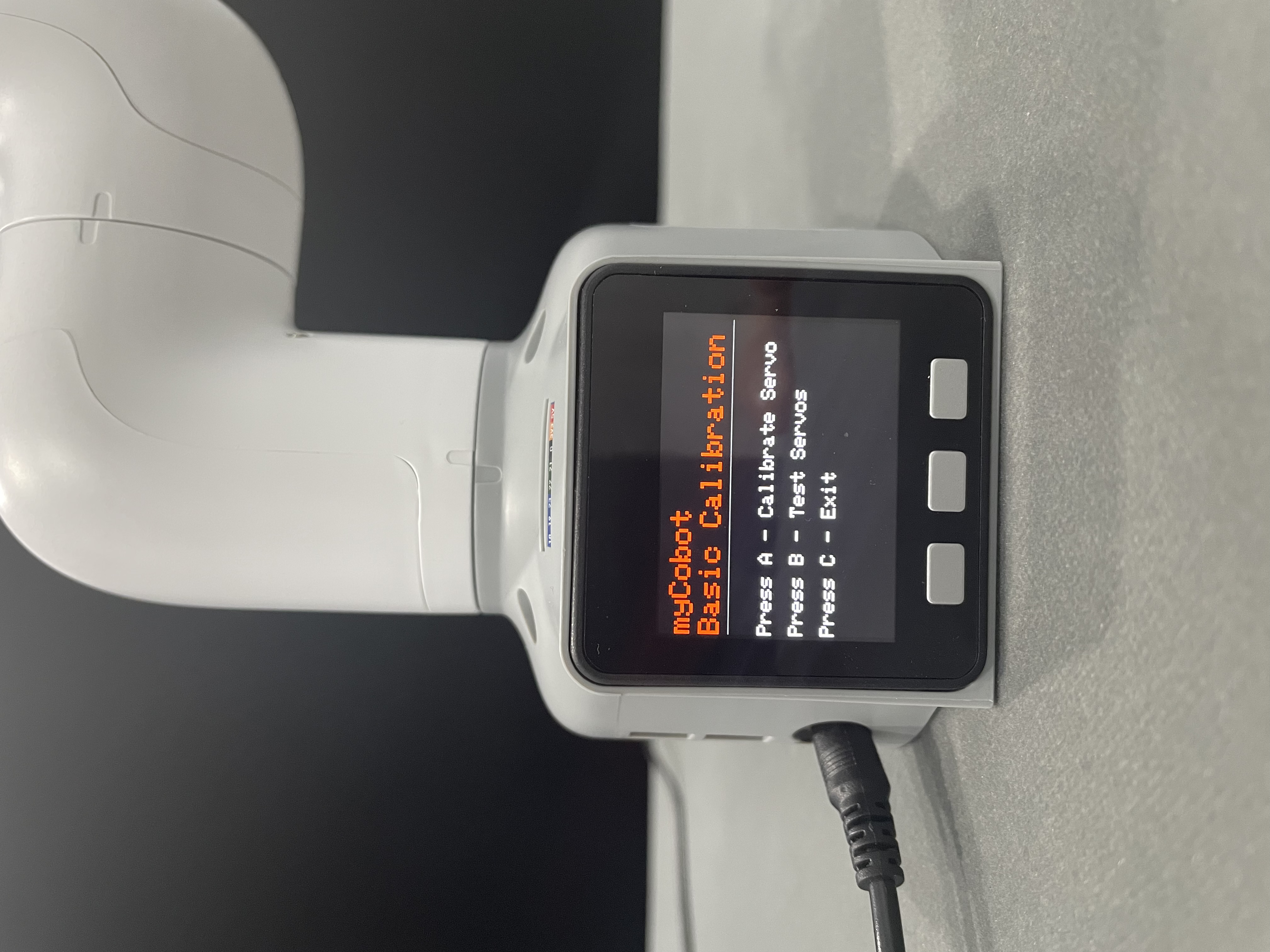
Calibrationボタンを押すとロボットアームのキャリブレーションがスタートします。Testボタンを押すとゼロポジションのテストを行います。Exitボタンを押すと機能を終了します。
この章では、ロボットアームのキャリブレーションとテスト、ジョイントの設定方法について扱います。
出典 : Elephant Robotics資料 Robot arm calibration