4.2.2.2 キャリブレーションの始め方(マイクロCPUベースの製品の場合)
4.2.2.2.1 対象製品
- myCobot 280-Pi
- myCobot 320-Pi
4.2.2.2.2 操作方法
-
最新バージョンのatomMainをAtomに書き込みます。
-
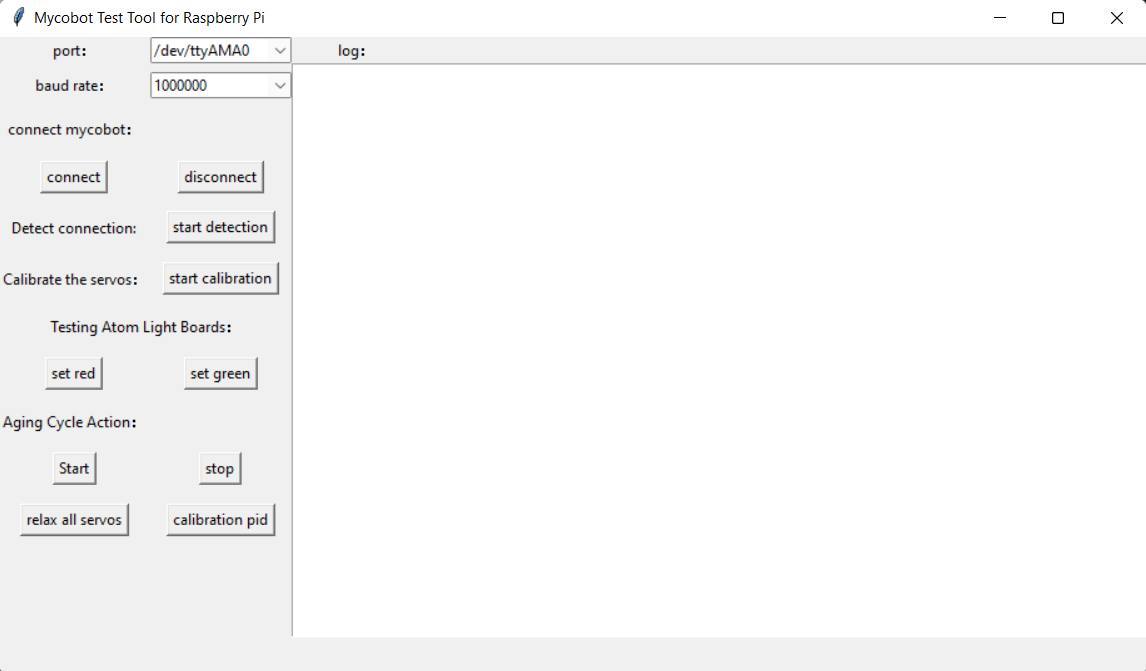
\"Run program\"をクリックします。
-
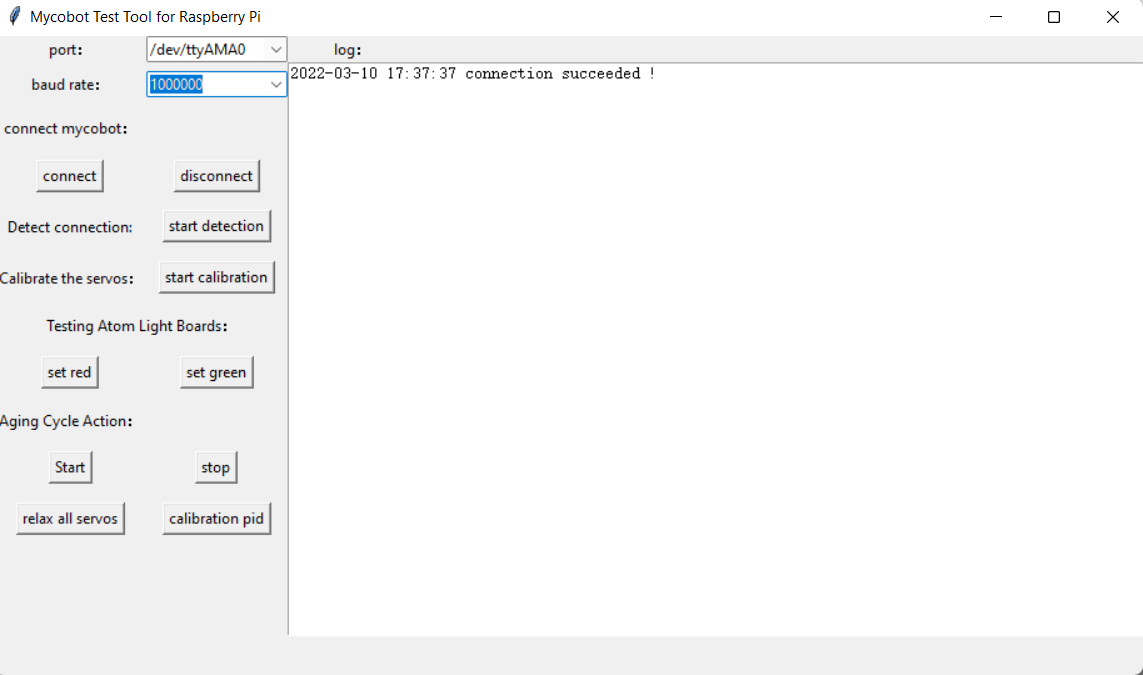
製品ごとに対応するボーレートを入力して
Connectをクリックします。 - myCobot 280-Pi :1000000
- myCobot 320-Pi : 115200
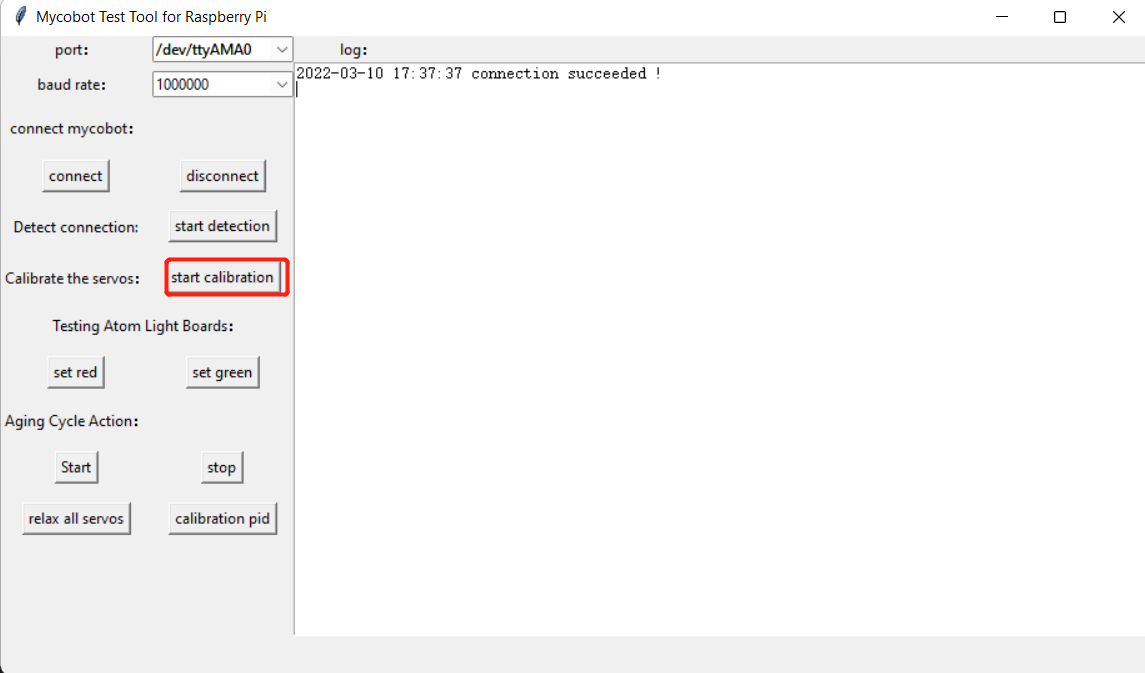
- ロボットアームのすべてのジョイントがゼロポジションに合うように動かします。
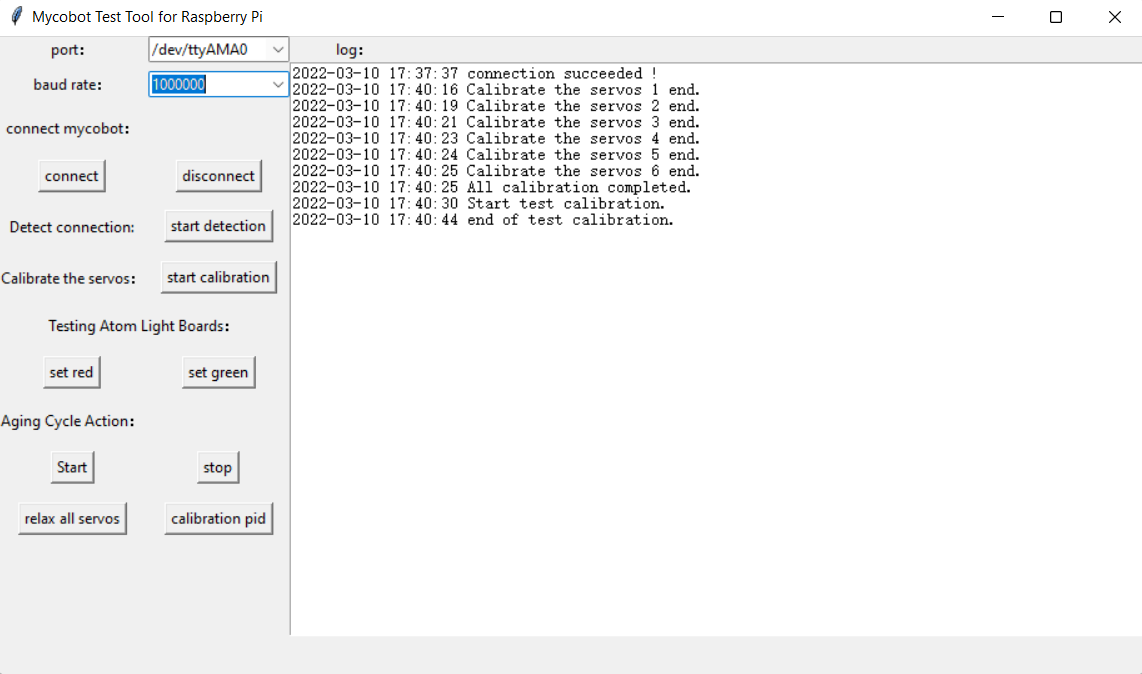
Start calibrationをクリックします。
Calibration completedと表示されたらキャリブレーションは終了です。
4.2.2.2.3 コード
*コードはrasp_mycobot_test_gui.pyです。GitHubからダウンロードできます。
出典 : Elephant Robotics資料 Starting robot arm calibration (for micro-CPU devices)