4.2.3.1 トランスポンダ設定(マイクロコントローラベースの製品の場合)
4.2.3.1.1 対象製品
- myCobot 280-M5
- myCobot 320-M5
- myPalletizer 260
4.2.3.1.2 操作方法
- 最新バージョンのatomMainをAtomに書き込みます。
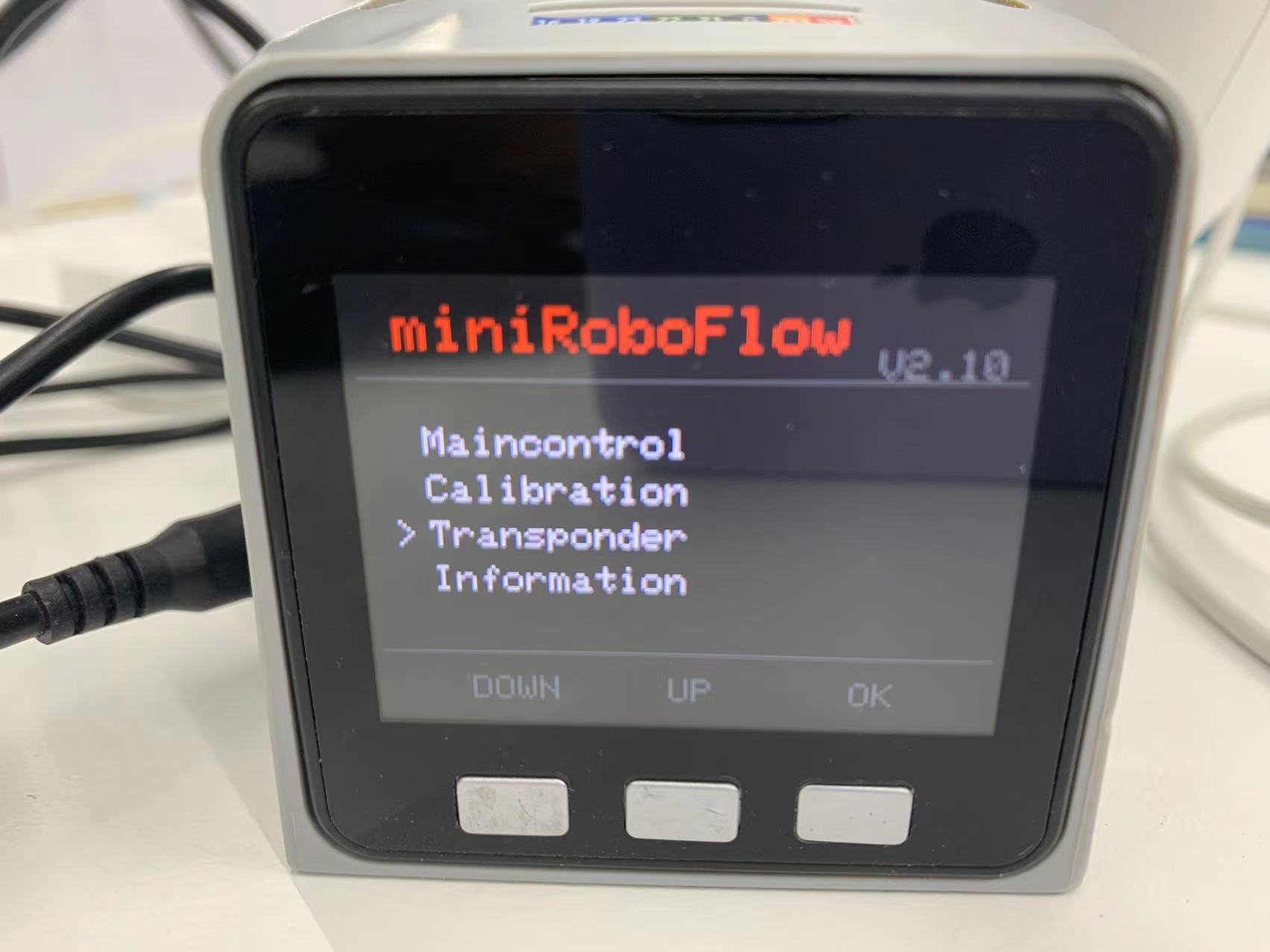
- Basicにminirobotを書き込み、
Transponder機能を選択します。
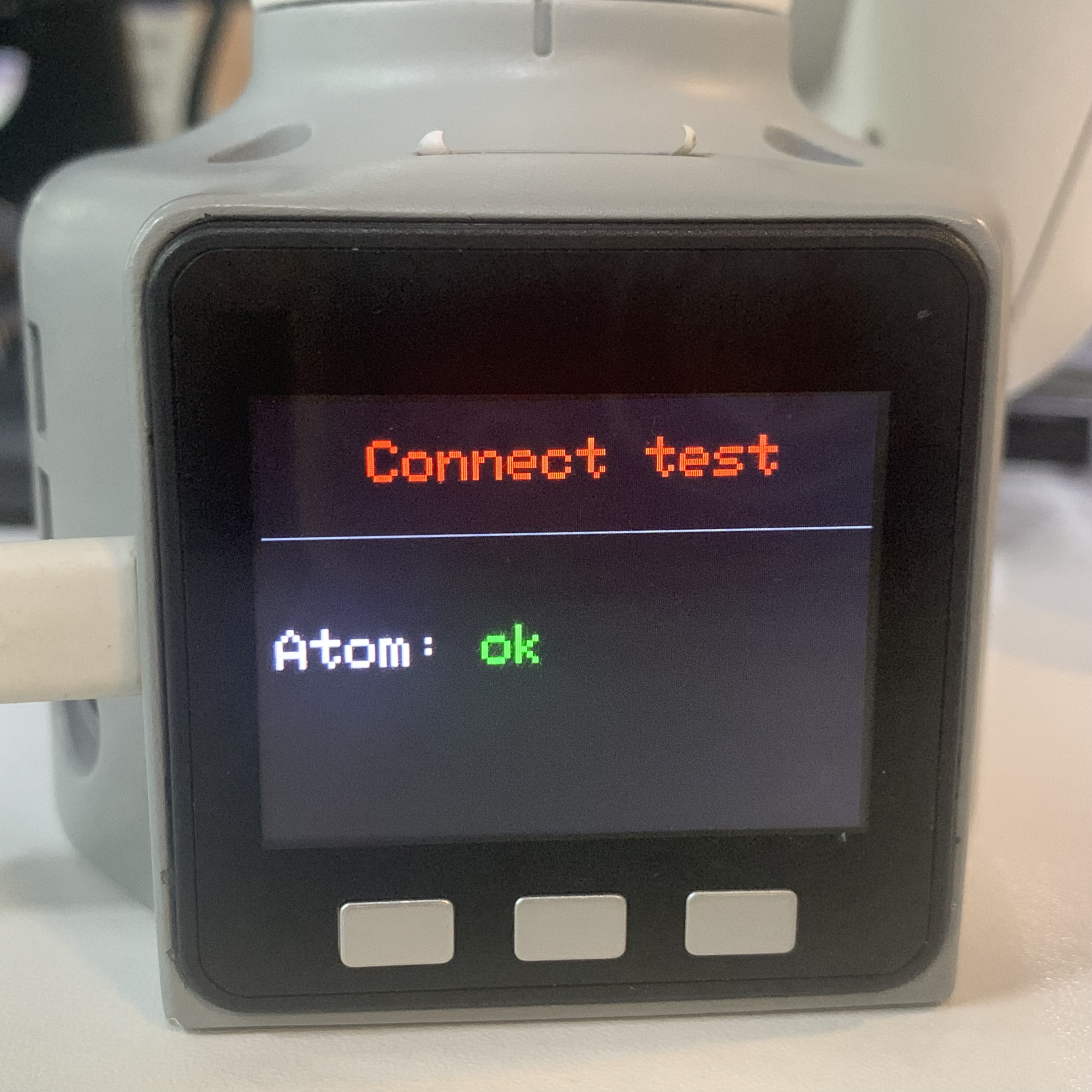
Aキー : Atomの接続検知を行います(okと表示されれば通信状態は正常です。問題がある場合にはnoと表示されます)。

Cキー : プログラムを終了します。

出典 : Elephant Robotics資料 Starting communication forwarding (for micro-controller devices)